










Cảm Biến IMU 9 Trục, BWT901CL, Bluetooth 2.0 + USB HID ADAPTER
1.790.000₫
Cảm Biến IMU 9 Trục BWT901CL Bluetooth 2.0 tích hợp Gyro, Gia tốc, Từ kế 3 trục, đo Pitch-Roll-Yaw chính xác cao. Ứng dụng Kalman Filter cho dữ liệu ổn định, nhiễu thấp. Kết nối Bluetooth 2.0 không dây, pin tích hợp tiện lợi. Phù hợp robot, drone, IoT, định vị và điều khiển tự động
MIÊU TẢ CẢM BIẾN IMU 9 TRỤC, BWT901CL, Bluetooth 2.0
-
Cảm biến IMU 9 trục cao cấp tích hợp Gyroscope (con quay hồi chuyển), Accelerometer (gia tốc kế) và Magnetometer (từ kế), cung cấp dữ liệu chuyển động đầy đủ, chính xác và ổn định.
-
Đo lường đa dạng thông số: gia tốc 3 trục, vận tốc góc, góc Pitch – Roll – Yaw và từ trường 3 trục, đáp ứng tốt các yêu cầu đo chuyển động không gian.
-
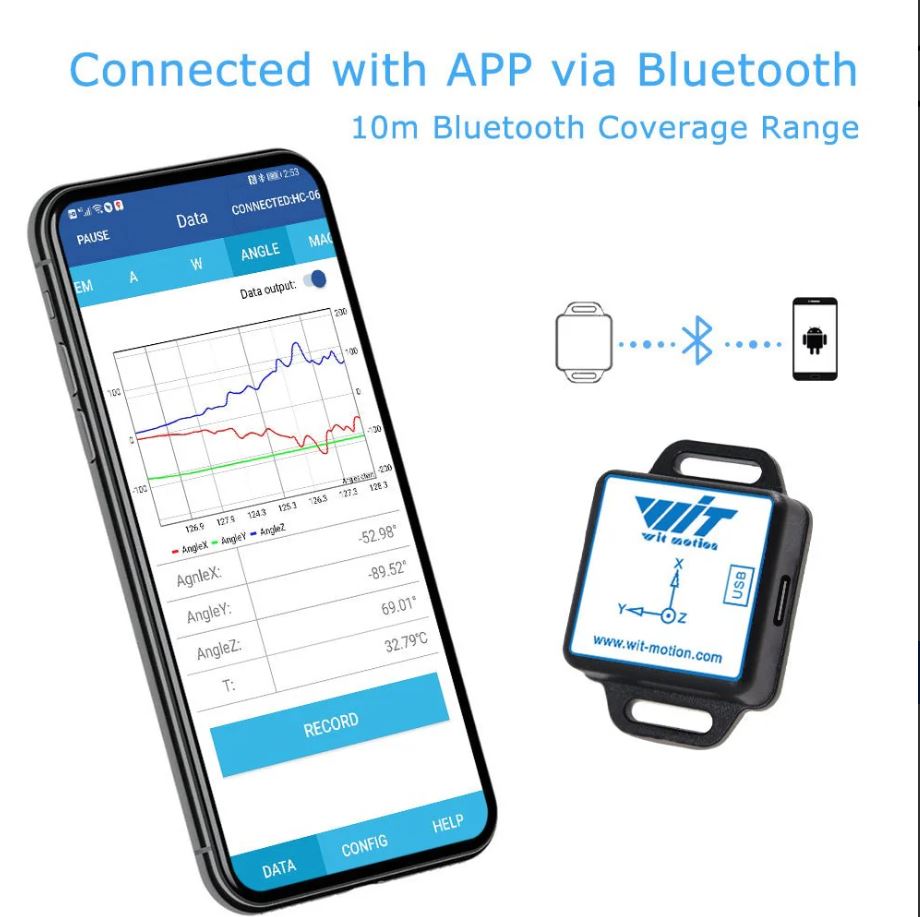
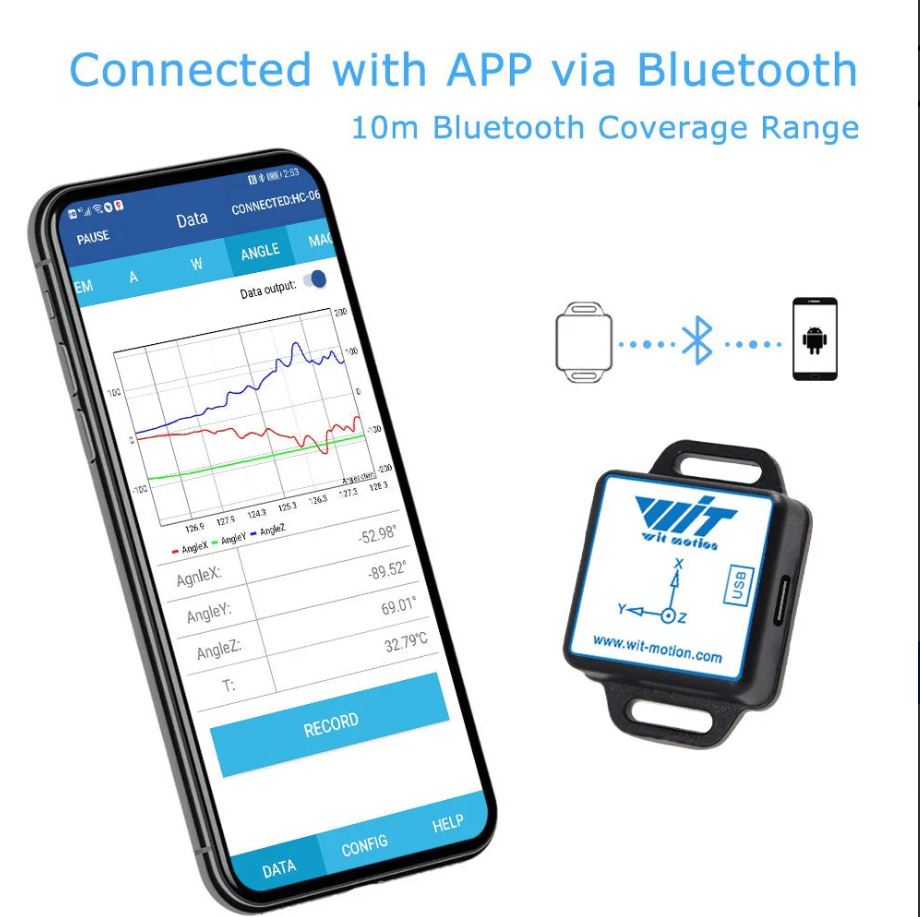
Kết nối Bluetooth 2.0 không dây, truyền dữ liệu trực tiếp đến máy tính, điện thoại hoặc bộ điều khiển, giúp lắp đặt nhanh gọn, không cần dây cáp phức tạp.
-
Hỗ trợ phần mềm WITMOTION, cho phép theo dõi dữ liệu thời gian thực, cấu hình và kết nối đa thiết bị dễ dàng.
-
Pin tích hợp dung lượng cao, cho phép thiết bị hoạt động liên tục trong nhiều giờ, phù hợp cho đo đạc di động và thử nghiệm dài hạn.
-
Thuật toán Kalman Filter tích hợp, giúp lọc nhiễu, ổn định tín hiệu và nâng cao độ chính xác đo góc so với các cảm biến IMU thông thường.
-
Ứng dụng rộng rãi trong các lĩnh vực: robot, drone/UAV, định vị – dẫn đường, ổn định thiết bị, IoT và hệ thống điều khiển tự động.
ĐIỂM NỔI BẬT
- 9 trục đầy đủ: đo gia tốc, góc quay, góc nghiêng và từ trường 3 trục
- Bluetooth 2.0: kết nối không dây tiện lợi
- Thuật toán Kalman Filter: dữ liệu ổn định, ít nhiễu
- Ứng dụng rộng: robot, máy bay FPV/UAV, IoT, định vị & cân bằng hệ thống
- Thiết kế linh hoạt: dễ tích hợp vào dự án Arduino, Raspberry Pi, hệ thống nhúng
CHỨC NĂNG CẢM BIẾN IMU 9 Trục BWT901CL
-
Đo gia tốc 3 trục (X – Y – Z)
Giám sát chuyển động tịnh tiến, rung động và thay đổi tốc độ theo không gian. -
Đo vận tốc góc 3 trục (Gyroscope)
Xác định chuyển động quay, xoay và tốc độ quay của thiết bị theo thời gian thực. -
Đo từ trường 3 trục (Magnetometer)
Hoạt động như la bàn điện tử, xác định hướng và phương vị chính xác. -
Tính toán góc không gian Pitch – Roll – Yaw
Cung cấp dữ liệu góc nghiêng và hướng quay phục vụ cân bằng và điều khiển. -
Ổn định dữ liệu bằng Kalman Filter
Lọc nhiễu hiệu quả, giảm sai số đo và nâng cao độ chính xác khi thiết bị chuyển động. -
Truyền dữ liệu không dây qua Bluetooth 2.0
Gửi dữ liệu IMU liên tục đến điện thoại, máy tính hoặc bộ điều khiển trung tâm. -
Hoạt động độc lập với pin tích hợp
Cho phép đo đạc di động, không phụ thuộc nguồn ngoài. -
Xuất dữ liệu thời gian thực
Phù hợp cho các ứng dụng giám sát, điều khiển và phân tích chuyển động. -
Dễ dàng tích hợp hệ thống
Sử dụng trực tiếp với phần mềm WITMOTION hoặc tích hợp vào các hệ thống nhúng, robot, IoT.
THÔNG SỐ KỸ THUẬT
-
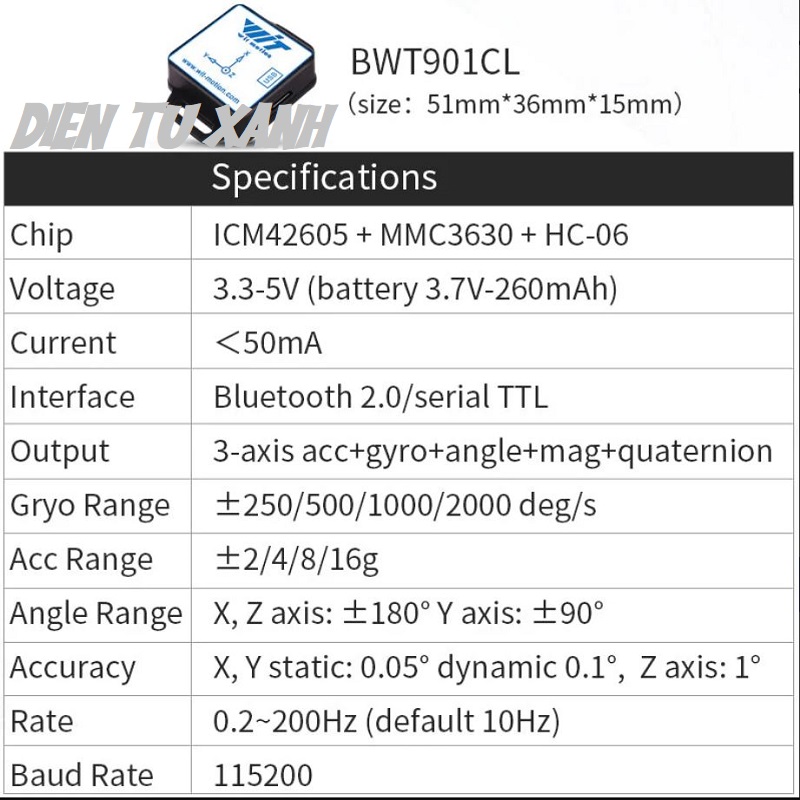
Model: BWT901CL – cảm biến IMU 9 trục Bluetooth 2.0 đa năng (Nine-Axis IMU Sensor)
-
Cảm biến tích hợp:
-
Gia tốc kế 3 trục
-
Con quay hồi chuyển (Gyroscope) 3 trục
-
Từ kế (Magnetometer) 3 trục
-
-
Thuật toán xử lý: Kalman Filter – lọc nhiễu và tăng độ chính xác dữ liệu
-
Giao tiếp: Bluetooth 2.0 không dây, Serial TTL/USB
-
Điện áp hoạt động: 3.3–5 VDC
-
Kích thước module: ~51 × 36 × 15 mm
-
Dải đo:
-
Gia tốc: ±16 g (áp dụng thông dụng)
-
Vận tốc góc: ±2000°/s (typical range)
-
Dữ liệu góc (Pitch/Roll/Yaw) và từ trường (Mag) xuất ra đầy đủ
-
-
Tần số dữ liệu: 0.1–200 Hz (có thể chọn tần số đầu ra khác nhau)
-
Bluetooth Range: ~10 m không cản trở
-
Pin tích hợp: Lithium ~260 mAh – cho phép hoạt động liên tục lên đến ~4 giờ
-
Độ chính xác đo góc: ~0.05° static, ~0.1° dynamic (thông số ứng dụng thực tế tham khảo)
-
Giao diện kết nối: Bluetooth trực tiếp hoặc Serial TTL qua USB-HID adapter
-
Tương thích phần mềm:
-
Phần mềm PC (Windows) hiển thị dữ liệu thời gian thực, biểu đồ, calibration…
-
Ứng dụng Android/ iOS theo dõi dữ liệu, xuất file TXT…
-
-
Chuẩn chất lượng: ISO9001:2016 (chuẩn quản lý chất lượng)
Ghi chú nhanh
-
Module sử dụng chip cảm biến MPU-9250 cho IMU 9-axis (gia tốc + gyro + mag) chính xác cao.
-
Cảm biến có thể cấu hình tần số và output trong phần mềm.
ƯU ĐIỂM NỔI BẬT – IMU 9 TRỤC BWT901CL
-
Hiệu năng cao:
Xuất dữ liệu ổn định, đo đầy đủ 9 trục gồm gia tốc, gyroscope, góc Pitch – Roll – Yaw và từ trường 3 trục. Hỗ trợ tùy chỉnh tần số xuất dữ liệu 0.2 – 200Hz. -
Thiết kế bền bỉ:
Pin tích hợp cho thời gian hoạt động lên đến 4 giờ, hỗ trợ vừa sạc vừa đo liên tục. Kết nối Bluetooth 2.0 với tầm hoạt động khoảng 10 mét (không vật cản). -
Hỗ trợ đa kết nối:
Cho phép kết nối nhiều cảm biến cùng lúc thông qua phần mềm WITMOTION trên PC (cần USB-HID adapter). -
Ưu thế công nghệ WITMOTION:
Hơn 8 năm kinh nghiệm trong lĩnh vực đo tư thế. Tích hợp thuật toán hợp nhất dữ liệu và Kalman Filter, đảm bảo dữ liệu ổn định, nhiễu thấp, độ chính xác cao. -
Hỗ trợ & bảo hành:
Bảo hành 12 tháng, hỗ trợ kỹ thuật trọn đời từ đội ngũ WITMOTION.
ỨNG DỤNG – IMU 9 TRỤC BWT901CL
Cảm Biến IMU 9 Trục BWT901CL được ứng dụng rộng rãi trong nhiều lĩnh vực nhờ khả năng đo chuyển động chính xác và truyền dữ liệu không dây qua Bluetooth 2.0:
-
Robot & Robot tự hành
Đo góc nghiêng, hướng quay, ổn định chuyển động và định hướng không gian. -
Drone, UAV, máy bay mô hình
Ổn định bay, xác định Pitch – Roll – Yaw, hỗ trợ hệ thống cân bằng và điều khiển. -
IoT & thiết bị thông minh
Giám sát rung động, trạng thái chuyển động, định vị tư thế thiết bị từ xa qua Bluetooth. -
Định vị & dẫn đường (AHRS)
Ứng dụng trong hệ thống dẫn đường, la bàn điện tử, đo hướng và góc không gian. -
Công nghiệp & tự động hóa
Giám sát độ nghiêng, rung lắc của máy móc, băng tải, thiết bị cơ khí. -
Ô tô & phương tiện thông minh
Theo dõi chuyển động, cân bằng, đo góc nghiêng và phân tích trạng thái vận hành. -
VR / AR & thiết bị chuyển động
Theo dõi cử chỉ, chuyển động thời gian thực với độ trễ thấp. -
Nghiên cứu & giáo dục
Phù hợp cho thí nghiệm IMU, thuật toán Kalman Filter, xử lý tín hiệu và hệ thống nhúng.
HƯỚNG DẪN SỬ DỤNG CƠ BẢN – IMU 9 TRỤC BWT901CL
1. Khởi động thiết bị
-
-
Sạc pin cho module bằng cổng USB trước khi sử dụng.
-
Nhấn nút nguồn để bật cảm biến.
-
Đèn LED sáng → thiết bị đã hoạt động và sẵn sàng kết nối.
-
2. Kết nối Bluetooth
-
-
Bật Bluetooth trên điện thoại hoặc máy tính.
-
Tìm thiết bị có tên BWT901CL / WT901.
-
Kết nối trực tiếp (không cần mật khẩu hoặc theo hướng dẫn của phần mềm).
-
3. Cài đặt phần mềm WITMOTION
-
-
Tải phần mềm WITMOTION (PC Windows hoặc App Android / iOS).
-
Mở phần mềm → chọn kết nối Bluetooth → chọn thiết bị BWT901CL.
-
Sau khi kết nối thành công, dữ liệu sẽ hiển thị theo thời gian thực.
-
4. Xem dữ liệu cảm biến
Trong phần mềm có thể theo dõi:
-
-
Gia tốc 3 trục (X – Y – Z)
-
Vận tốc góc (Gyroscope)
-
Góc Pitch – Roll – Yaw
-
Từ trường / hướng la bàn
-
Biểu đồ dữ liệu và giá trị số
-
5. Hiệu chuẩn (Calibration)
-
-
Đặt cảm biến trên mặt phẳng cố định.
-
Thực hiện Calibration Gyro / Acc / Mag trong phần mềm.
-
Hiệu chuẩn giúp tăng độ chính xác khi đo góc và hướng.
-
6. Cấu hình cơ bản
-
-
Chọn tần số xuất dữ liệu (ví dụ: 10Hz, 50Hz, 100Hz…).
-
Bật/tắt các kênh dữ liệu cần sử dụng.
-
Cài đặt chế độ truyền dữ liệu phù hợp với ứng dụng.
-
7. Ứng dụng thực tế
-
-
Gắn cố định cảm biến lên thiết bị cần đo (robot, drone, khung máy…).
-
Đảm bảo module không rung lắc tự do trong quá trình đo.
-
Sử dụng dữ liệu để giám sát, điều khiển hoặc phân tích chuyển động.
-
Lưu ý khi sử dụng
-
-
Tránh đặt gần nam châm mạnh hoặc nguồn nhiễu điện từ.
-
Nên hiệu chuẩn lại khi thay đổi vị trí lắp đặt.
-
Sạc pin định kỳ để đảm bảo thiết bị hoạt động ổn định.
-
BỘ SẢN PHẨM BAO GỒM
- 1 × Cảm Biến IMU 9 Trục BWT901CL Bluetooth 2.0
- 1 × Cáp sạc
- 1 × Hướng dẫn sử dụng nhanh
- USB-HID adapter
TECHNICAL DOCUMENTATION & DOWNLOADS
06. Bluetooth USB-HID Configuration
THÔNG TIN LIÊN HỆ
- 📞 Zalo / Hotline / WhatsApp: 0939 395 952
- 📧 Email: dientuxanhvn@gmail.com
- 🌐 Website: www.dientuxanh.vn
- 🌐 Website: www.dtxvn.com
| Cân nặng | 1 kg |
|---|---|
| Kích thước | 30 × 30 × 5 cm |
Hãy là người đầu tiên nhận xét “Cảm Biến IMU 9 Trục, BWT901CL, Bluetooth 2.0 + USB HID ADAPTER”
Sản phẩm tương tự









Đánh giá
Chưa có đánh giá nào.